



La UPM crea robots organizados socialmente para ayudarse entre sí
Investigadores de la Universidad Politécnica de Madrid (UPM) han creado SMART1, un sistema de agentes robóticos cooperativos

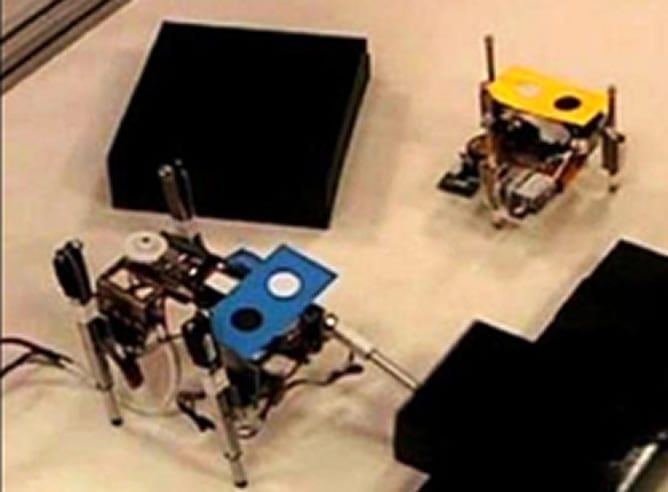
SMART1 es un sistema de agentes robóticos cooperativos(UPM)
La universidad ha indicado que su grupo de Robots y Máquinas Inteligentes ha desarrollado este sistema de agentes (robots) cuya finalidad principal es "lograr la mejor configuración para cumplir un objetivo" para ello "se ayudan mutuamente valiéndose de las mejores aptitudes del robot-individuo".
Más información
"Si algún agente no puede completar su misión, otros acuden en su ayuda, a tal extremo que pueden sustituirlo en la tarea original o bien ayudarlo para que la termine", ha concretado la UPM, que también explica que, para conseguirlo, ha desarrollado una "sofisticada" arquitectura software y hardware donde la cinemática, la dinámica y la planificación de trayectorias, entre otras, "se combinan a través de un sistema de control inteligente para que los agentes robóticos desarrollen sus cometidos".
Además, ha explicado que el grupo de agentes cuenta con robots de tres y cuatro patas, con ocho y trece grados de libertad, respectivamente, y que cada uno dispone de un sistema de comunicación bluetooth "para contactar con un puesto central de control desde el cual se establecen las tareas a realizar".
En este sentido, la UPM ha indicado que cuando un agente no puede cumplir con su misión, envía un mensaje con una codificación específica al ordenador central, "que se encarga de distribuirlo a aquellos que se encuentren en posibilidad de acudir a su llamada". "Dependiendo de la prioridad del mensaje enviado, es posible que los miembros del grupo dejen de realizar sus tareas y acuda en "auxilio" de su compañero", ha añadido.
También ha precisado que estos agentes han sido concebidos "para inspeccionar y actuar en zonas de desastres y que podrían desarrollar tareas de manipulación", así como que las capacidades de los robots de cuatro patas tienen "una mayor capacidad de locomoción y son más estables, pero son grandes, pesados y más lentos que los de tres patas que, por el contrario, no tienen más opciones que reptar para desplazarse". Por último, ha destacado que con este tipo de sistemas se han realizado aportaciones, entre otros, en el campo de la planificación de trayectorias, del modelado cinemático de robots con patas.


